
5 モータを回してみよう
5-1 モータ&モータドライバの組み立て
ロボットの『動く』部分を担当するのがモータです。
モータは皆さんも一度は目にしたことがある、電池につなげば軸がぐるぐる回る部品。このモータを思い通りに回せるようになると、車輪を回したり、ロボットの関節の部分に組み込んで腕や脚を動かしたりと、様々なことができるようになります。モータを思い通りに回すために必要なのが、PWM機能と、本章で作成するモータドライバに入っているHブリッジ回路。この章ではモータの仕組みを知り、PWM機能とモータドライバ(Hブリッジ)を使ってモータを回してみましょう。
7-1 モータ&モータドライバの組み立て
① モータの組み立て
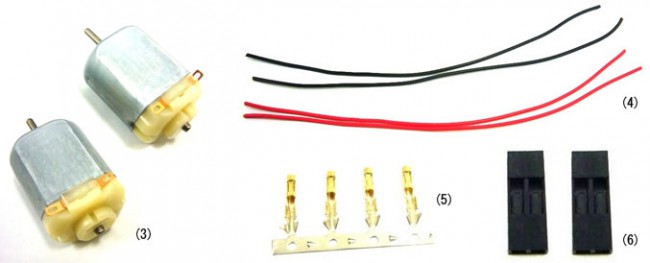
用意するもの
道具 (1) ハンダごて・ハンダ (2) 圧着工具
部品 (3) DCモータ 2個 (4) ケーブル赤・黒 各2本 (5) コネクタピン 4個
(6) コネクタハウジング(2ピン) 2個
手順① モータにケーブルをハンダ付けする。
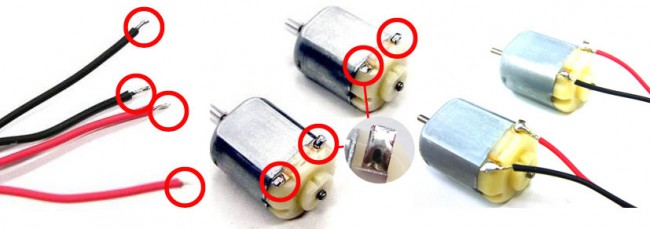
被膜をむいたケーブル先端とモータの端子部分に、あらかじめ予備ハンダをしておきます。モータの端子部分に赤黒のケーブルをそれぞれハンダ付けしたら、赤黒のケーブルの長さが揃うように、ハンダ付けしたのと反対側のケーブルの端を切り揃えます。
手順② ケーブルにコネクタピンを圧着し、ハウジングに差し込む。
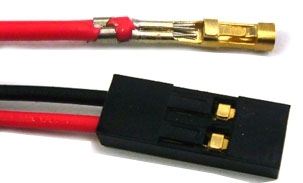
圧電スピーカの組み立ての手順②~④と同様に、切り揃えたケーブル端の被膜をはがし、コネクタピンを圧着します。圧着したらハウジングに差し込みます。
手順③ 完成!

② モータドライバ組み立て
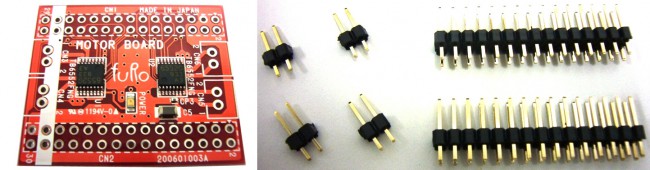
用意するもの
道具 (1) ハンダごて・ハンダ
部品 (2) モータドライバボード 1枚
(3) ピンヘッダ 2×1ピン 4個 2×15ピン 2個
a. モータドライバボードの組み立て
手順① モータドライバボード・表面にピンヘッダをハンダ付けします。
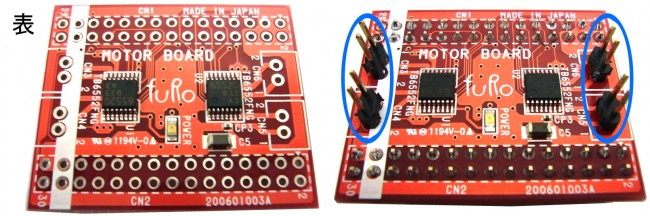
『fuRo』の文字が書いてある方が表面です。2×1ピンをCN3,CN4,CN5,CN6の4カ所へ、長い方が表面に出るように差し込み、裏側からハンダ付けします。
手順② モータドライバボード・裏面にピンヘッダをハンダ付けします。
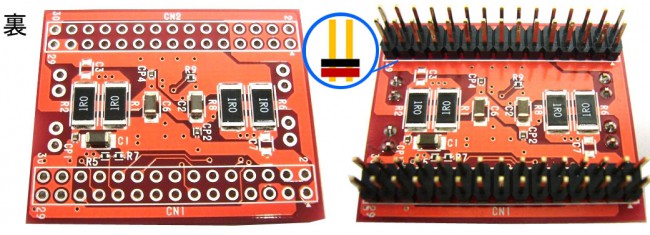
太い白ラインが印刷されていない、黒い部品が4つ並んでいるほうが裏面です。
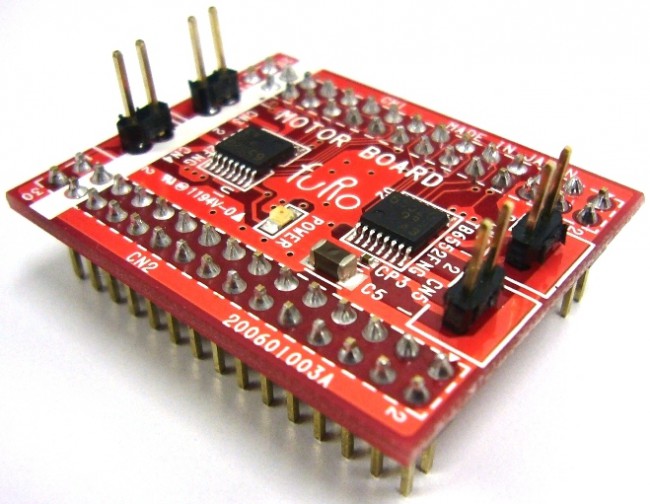
手順③ 完成!
モータ・モータドライバが完成したら、 f-palette I/Oボードに接続します。
b. モータ・モータドライバボードの接続
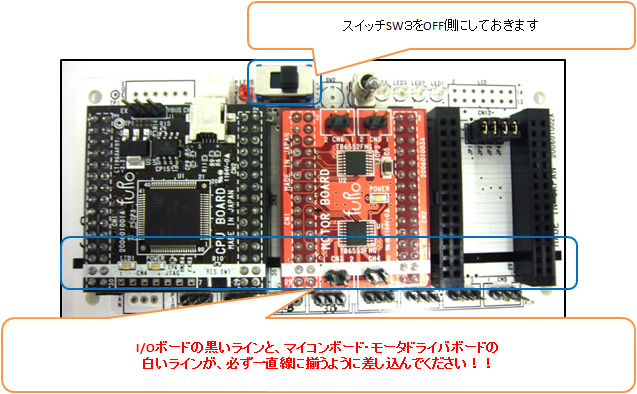
手順① JP(ジャンパピン)を確認します。
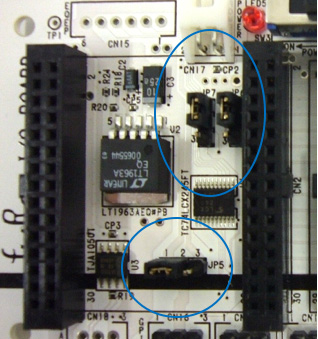
マイコンボードの下にあるJP5、JP6、JP7のジャンパピンは、すべて1-2をショート(接続)させます。
手順② マイコン・モータドライバボードをI/Oボードに接続します。
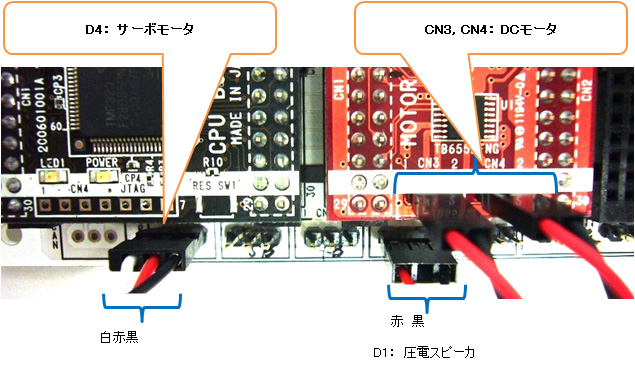
手順③ DCモータ、サーボモータと圧電スピーカーを接続します。
手順④ 電池とUSBケーブルを接続し、電源を入れます。
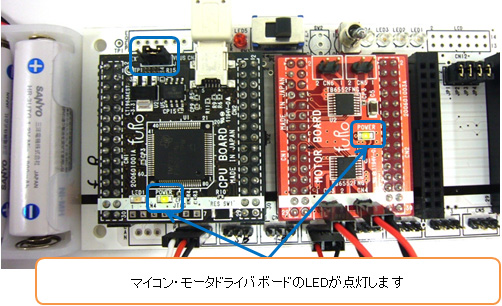
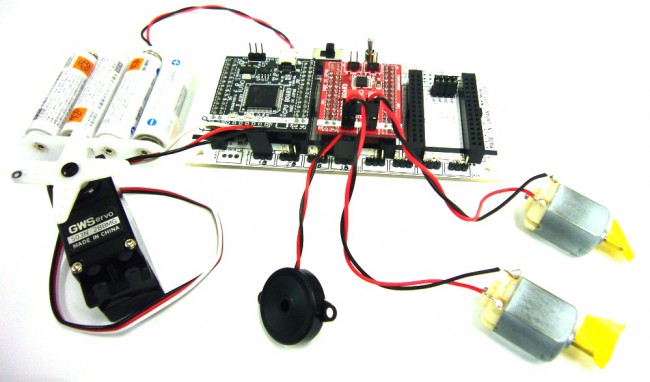
手順⑤ 完成!

使う工具・道具一覧
I/Oボードとマイコンボードを組み立てよう
- 2-1
- ハンダの基礎
- 2-2
- シルク印刷と電子部品
- 2-3
- I/Oボード作成
- 2-4
- マイコンボード作成
開発環境
- 4-1
- 開発環境「CCS」のインストール
- 4-2
- サポートファイルのインストール
- 4-3
- 開発環境「CCS」の使い方
- 4-4
- Arduino互換の開発環境「f-palette IDE」のインストール
LEDをぴかぴかさせてみよう -デジタル入出力(DIO)機能を使う
- 5-1
- サンプルプログラム『LED_Switch』の実行
- 5-2
- プログラムの中身を見てみよう
- 5-3
- LED_Switchチャレンジ
- 5-4
- f-palette IDEプログラムの実行
モータを回してみよう-PWM&モータドライバでモータを駆動する
- 7-1
- モータ&モータドライバの組み立て
- 7-2
- サンプルプログラム『Motors』の実行
- 7-3
- プログラムの中身を見てみよう
- 7-4
- Motorチャレンジ
- 7-5
- f-palette IDEプログラムの実行
センサでいろいろ測ってみよう-A/D(アナログ・デジタル)変換
- 8-1
- A/D(アナログ・デジタル)変換とは?
- 8-2
- PSDセンサの組み立て
- 8-3
- サンプルプログラム『PSD』の実行
- 8-4
- プログラムの中身を見てみよう
- 8-5
- センサの出力データを確認してみよう
- 8-6
- PSDチャレンジ
- 8-7
- f-palette IDEプログラムの実行
秋葉原にでかけよう
- 7-1
- 奥村研究員お薦めショップ
- 7-2
- 秋葉原マップ