Posted by admin
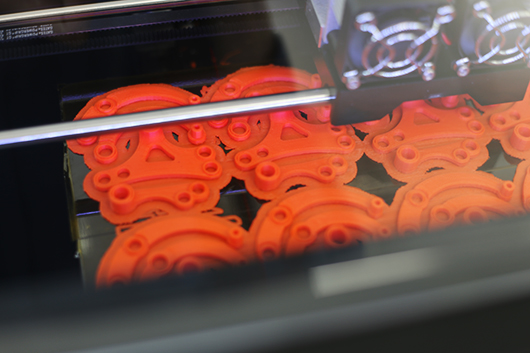
3Dプリンター、稼働中
某プロジェクトのため、Y研究員が数日前から3Dプリンターで何かを作っています。朝から晩まで刷りまくってます。 何ができるのでしょうか。3Dプリンターにはコツが色々あるようで、回数を重ねるごとに完成度が高くなっています。だ・・・> つづきを読む
Posted by admin
机の上から落ちないロボット。 左右と前にセンサをつけていて、スイッチで回避の方向を変えることができます。
Posted by admin
「6」は車輪が6個からきています。 台の上に物をおいたらどこかに運んでくれます。障害物回避と机から落ちないように センサをつけています。
Posted by admin
音声認識で「走れ」というと走り出します。その後は自動で障害物をよけるロボットになります。 「止まれ」というと止まります。
Posted by admin
全体が回転してしまうと揺れてしまったり、センサが床をよんでしまうので、 f-paletteをつっかえ棒にしています。安定してよく動いています!
Posted by admin
左右にある障害物はよけて、正面に障害物があったときだけ輪ゴムをとばします。 輪ゴムを打ったらすごい速度でバックします。いい逃げ足です。
Posted by admin
衝撃映像3連発。 前方で障害物を発見したら方向転換をして、脚を立てて逃げるはずだったロボットです。。
Posted by admin
前に障害物があるとよけ、後ろから追いかけられると逃げるロボット。ひっくりかえっても起き上がります。 初めてつくったとのことでロボットの重心や、重さなど失敗したところはありますが、チャレンジ精神が素敵です。
Posted by admin
映像からはわかりにくいのですが、上下に動いているPSDセンサーは状況をみて、覚えています。 ロボットがしっかり動いていなかったのでまた見せにきてほしいです。
Posted by admin
障害物をよけるロボット。スイッチで障害物をよけるモードが変わります。
Posted by admin
ほこりをどけるロボット。扇風機をサーボで下から上に回転させてほこりを遠くにとばし、残ったほこりを下にとりつけたブラシではきます。
Posted by admin
瓦礫の上を走るのではなく、下をくぐるロボット。
Posted by admin
前方にとりつけた距離センサを使って床を検知します。 床がないところにきたら、後ろに戻ります。ある程度もどったらまた前に進みます。
Posted by admin
障害物に向かって走っていき輪ゴムを発射するロボット。 全部打ち終わったら急旋回して逃げる予定でした。
Posted by admin
バスがジャックされている模様! 前方にタッチセンサがついていて、触れると後ろに下がります。本当はセンサに反応すると銃声が鳴り響くようにしたかったそうですが。。。