2012 – 落ちない四足歩行ロボット
未来ロボティクス学科・学部1年 鈴木大寛
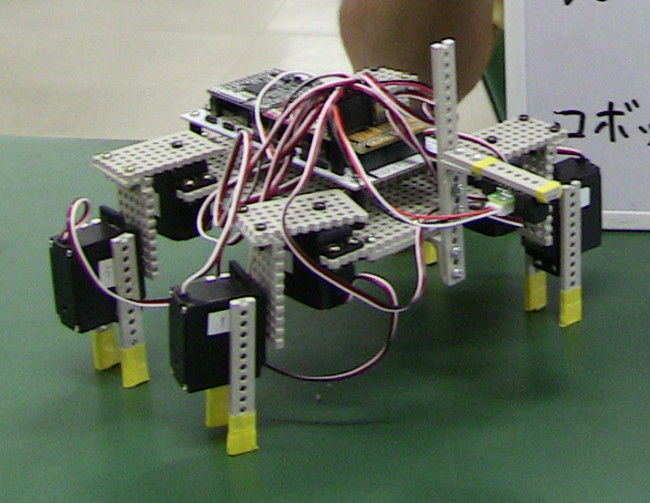
前方にとりつけた距離センサを使って床を検知します。
床がないところにきたら、後ろに戻ります。ある程度もどったらまた前に進みます。
映像の研究員のコメントの通りです。。
意図的にこの動きができてたらすごいです。
COMMENTS
コメントはありません。

前方にとりつけた距離センサを使って床を検知します。
床がないところにきたら、後ろに戻ります。ある程度もどったらまた前に進みます。
映像の研究員のコメントの通りです。。
意図的にこの動きができてたらすごいです。
コメントはありません。
![]()