2011 – ステアリングを切って障害物をよけるロボット
未来ロボティクス学科・学部1年 栗林祐太
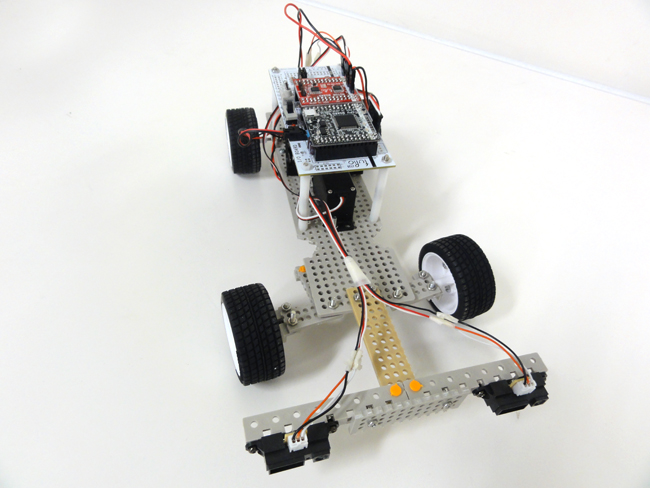

・いわゆる障害物回避ロボット
・サーボモータでステアリングを切っているが「アッカーマン・ジャント式」を採用
< 研究員からのコメント >
内輪のタイヤの方が角度が大きく切れる「アッカーマン・ジャント式」のステアリング機構により、小気味よい動きを実現できている。
COMMENTS
コメントはありません。

・いわゆる障害物回避ロボット
・サーボモータでステアリングを切っているが「アッカーマン・ジャント式」を採用
< 研究員からのコメント >
内輪のタイヤの方が角度が大きく切れる「アッカーマン・ジャント式」のステアリング機構により、小気味よい動きを実現できている。
コメントはありません。
![]()